
Graph 글 참고하기
Queue 글 참고하기
SPFA(Shortest Path Faster Algorithm)
The Shortest Path Faster Algorithm (SPFA)는 Bellman–Ford algorithm 을 개선한 알고리즘 으로서, 방향 가중치 그래프에서 단일 출발 정점 최단 거리를(Single source shortest path distance) 계산한다. 다른 여타 Bellman–Ford algorithm 이나 Dijkstra’s algorithm 과 같은 Single source shortest path algorithm 처럼 SPFA도 변 경감(Edge relaxation)을 핵심 연산으로 하여 동작한다.
이 SPFA는 무작위 희소 그래프에서 잘 동작한다고 알려져 있고, 음수 가중치 간선(Nagative weighted edge)을 가진 그래프에서도 적합하다. 그러나 최악 시간복잡도는 $O(|V|\cdot|E|)$ 로서 Bellman–Ford algorithm과 같기 때문에, 음수 가중치 간선이 없는 그래프의 경우에는 최악 시간복잡도를 고려한다면 Dijkstra’s algorithm이 더 적합하다고 볼 수 있다.
Algorithm
방향 가중치 그래프가 주어지고 $G = (V, E)$ 그리고 출발 정점을 $s$라고 하자. SPFA는 출발 정점 $s$으로부터 다른 모든 정점 $v$로의 최단 경로를 찾는다. $s$로 부터 $v$로의 최단 경로 거리는 각 정점 $v$에 대하여 $d(v)$에 저장된다.
SPFA는 각 정점의 인접 정점을 필요하다면 변 경감(Edge relaxation)하기 위해 각 정점을 후보자로 사용한다. 이 점은 Bellman–Ford algorithm과 같다. 하지만 Bellman–Ford algorithm과 비교했을 때의 개선점은 모든 정점들을 무조건 적으로 연산을 시도하기 보다는 SPFA는 후보자 정점에 대한 Queue를 가지고, 어떤 정점에 대해 그 정점이 변 경감 연산이 이루어졌을 때만 후보자 정점으로서 Queue에 삽입을 한다. 이런 행동들은 변 경감 연산이 실행될 정점이 없을 때까지 반복된다.
다음은 SPFA의 의사코드이다.
Input: 그래프 G, 시작 정점 s
$Q$는 변 경감 연산이 되고 난 후의 후보자를 담을 Queue를 의미한다.
$w(u,v)$는 간선 $(u,v)$의 간선 가중치를 의미한다.
Notice: Q 안에 v의 존재 유무를 판단하기 위해 구현 시에는 이를 추적하기 위한 추가적인 자료구조가 요구된다.
0 procedure Shortest-Path-Faster-Algorithm(G, s)
1 for each vertex v ≠ s in V(G)
2 d(v) := ∞
3 d(s) := 0
4 offer s into Q
5 while Q is not empty
6 u := poll Q
7 for each edge (u, v) in E(G)
8 if d(u) + w(u, v) < d(v) then
9 d(v) := d(u) + w(u, v)
10 if v is not in Q then
11 offer v into Q
하나씩 보자.
1 for each vertex v ≠ s in V(G)
2 d(v) := ∞
그래프 G의 출발 정점 s를 제외한 모든 정점 v에 대하여 s로부터 각 v에 대한 최단경로 거리 d(v)를 INF로 초기화 한다.
3 d(s) := 0
4 offer s into Q
먼저 출발 정점 s의 최단경로 거리를 0으로 초기화하고 s를 Q에 넣는다.
5 while Q is not empty
큐가 빌 때 까지 아래 연산들을 반복한다.
6 u := poll Q
7 for each edge (u, v) in E(G)
Q에서 정점하나를 꺼내 u라 하고, 그래프 G에서 u와 인접한 정점 v와의 간선 (u, v)에 대하여
8 if d(u) + w(u, v) < d(v) then
9 d(v) := d(u) + w(u, v)
s로부터 u로의 최단경로 거리 d(u) + 간선 (u, v)의 값이 s로부터 v로의 최단경로 거리 d(v)보다 작다면 d(v)값을 d(u) + w(u, v)로 업데이트 한다. (Edge Relaxation)
10 if v is not in Q then
11 offer v into Q
변 경감 연산(Edge Relaxation)이 된 정점 v가 현재 Q에 없으면, v를 Q에 추가한다.
Step by step
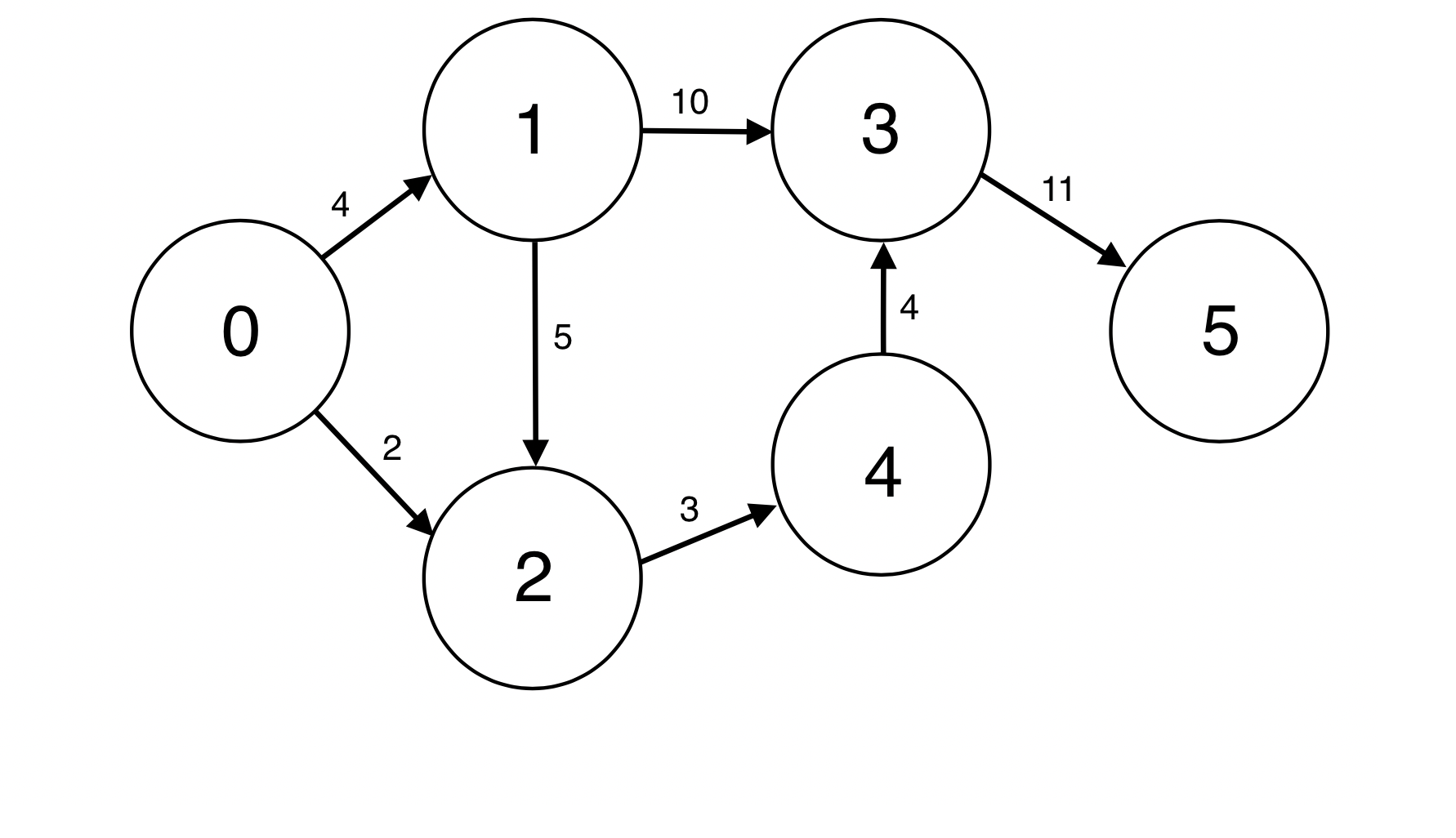
실제 그래프를 예로 들어 SPFA가 어떻게 동작하는지 알아보자.
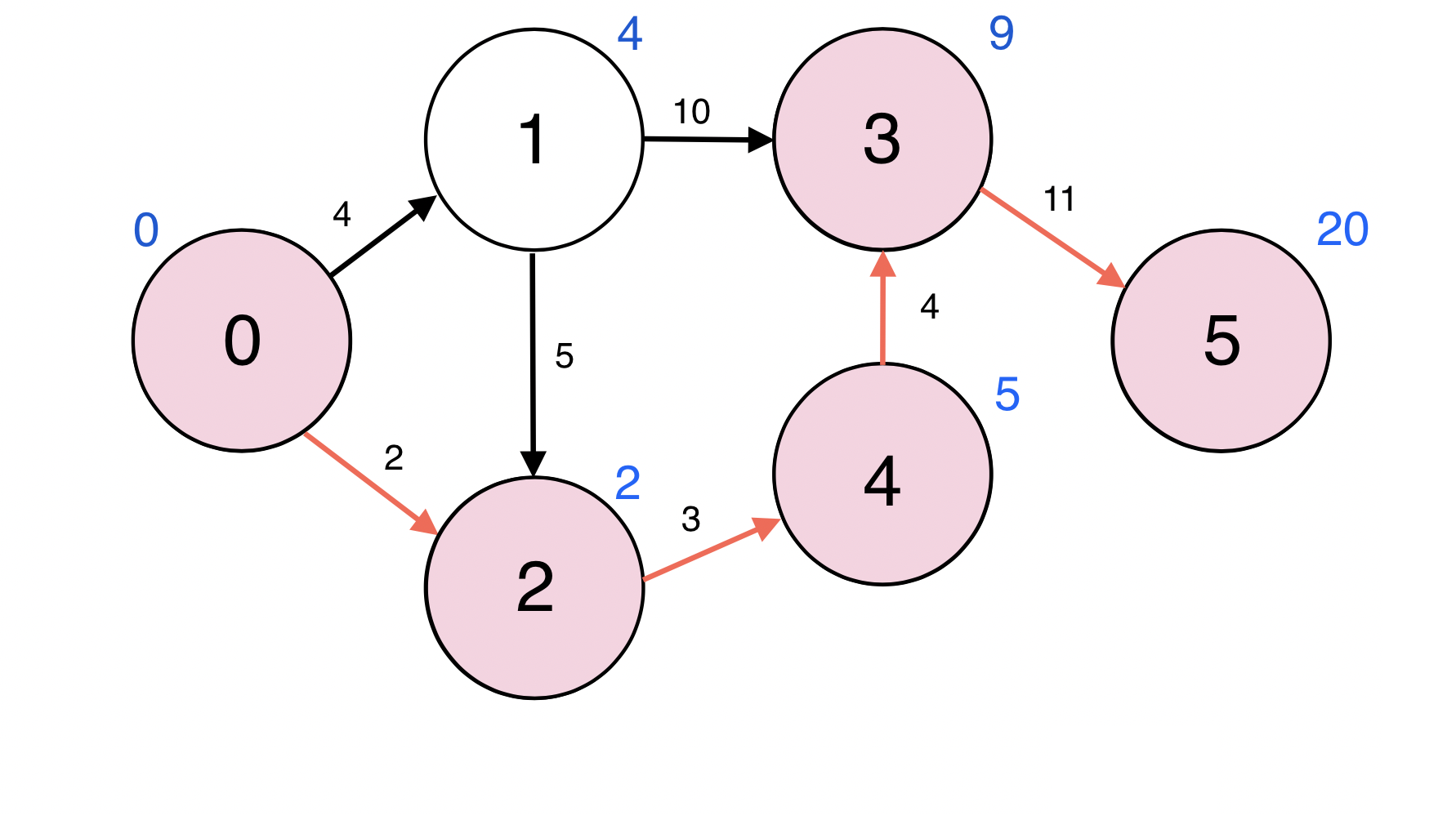
0번을 시작 정점으로 하여 5번 정점으로의 최단 경로를 구한다.
해당 정점에 연결된 인접 정점이 여러개 일 땐, 번호가 작은 것을 먼저 선택한다.
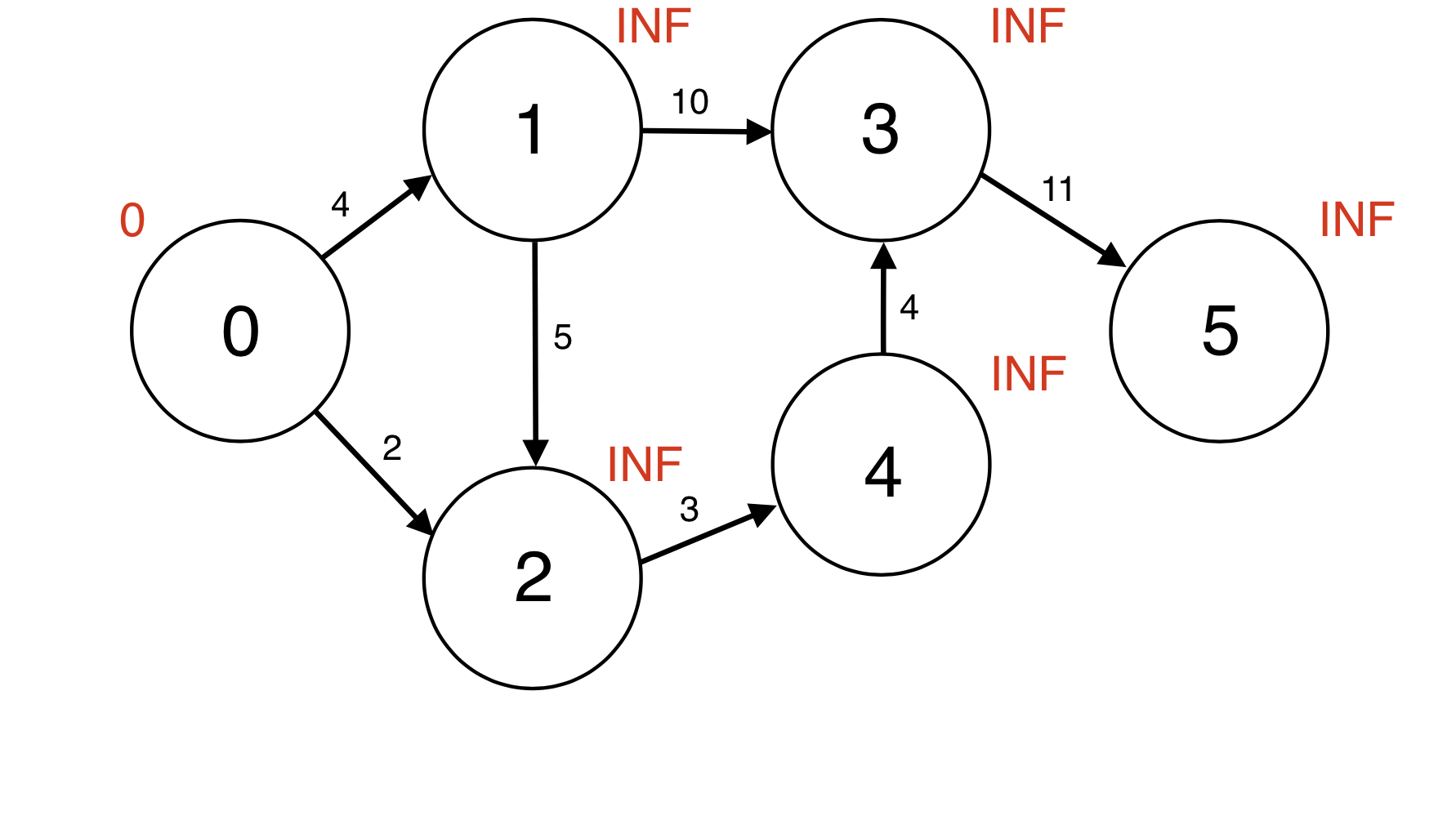
시작 정점으로 부터 모든 정점까지의 최단거리 d(v)를 무한대(INF)로 초기화 한다.
d(s)는 0으로 초기화 한다.
Queue에 시작 정점 0을 넣는다.
Queue : [0]
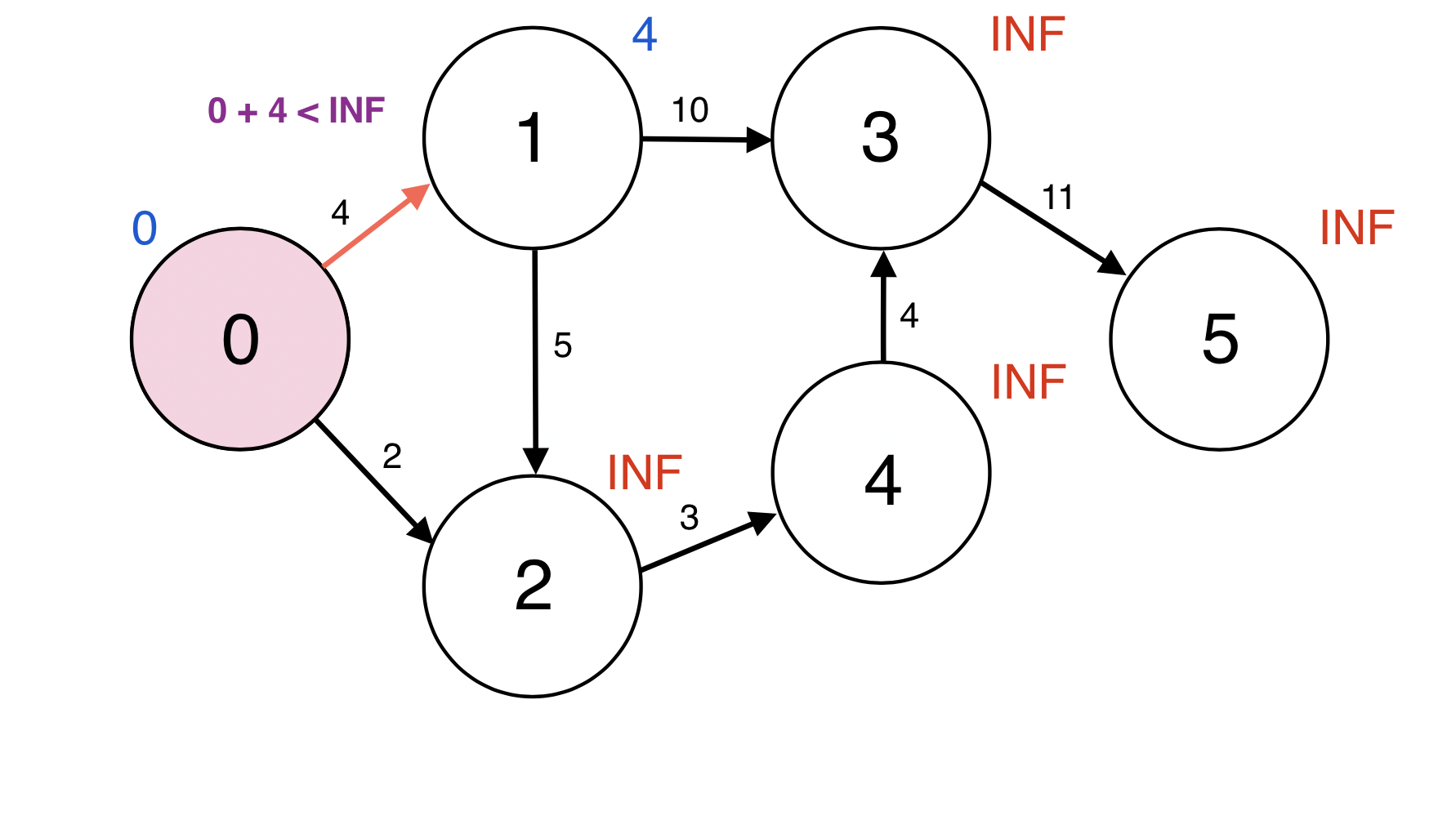
Queue에서 원소 하나를 pop한다.
0번 정점과 인접한 정점 1번에 대하여 d(0) + w(0, 1) < d(1): 0 + 4 < INF이므로
d(1)을 4로 업데이트 한다.
업데이트 되었으므로 1번 정점을 Queue에 넣는다.
Queue : [1]
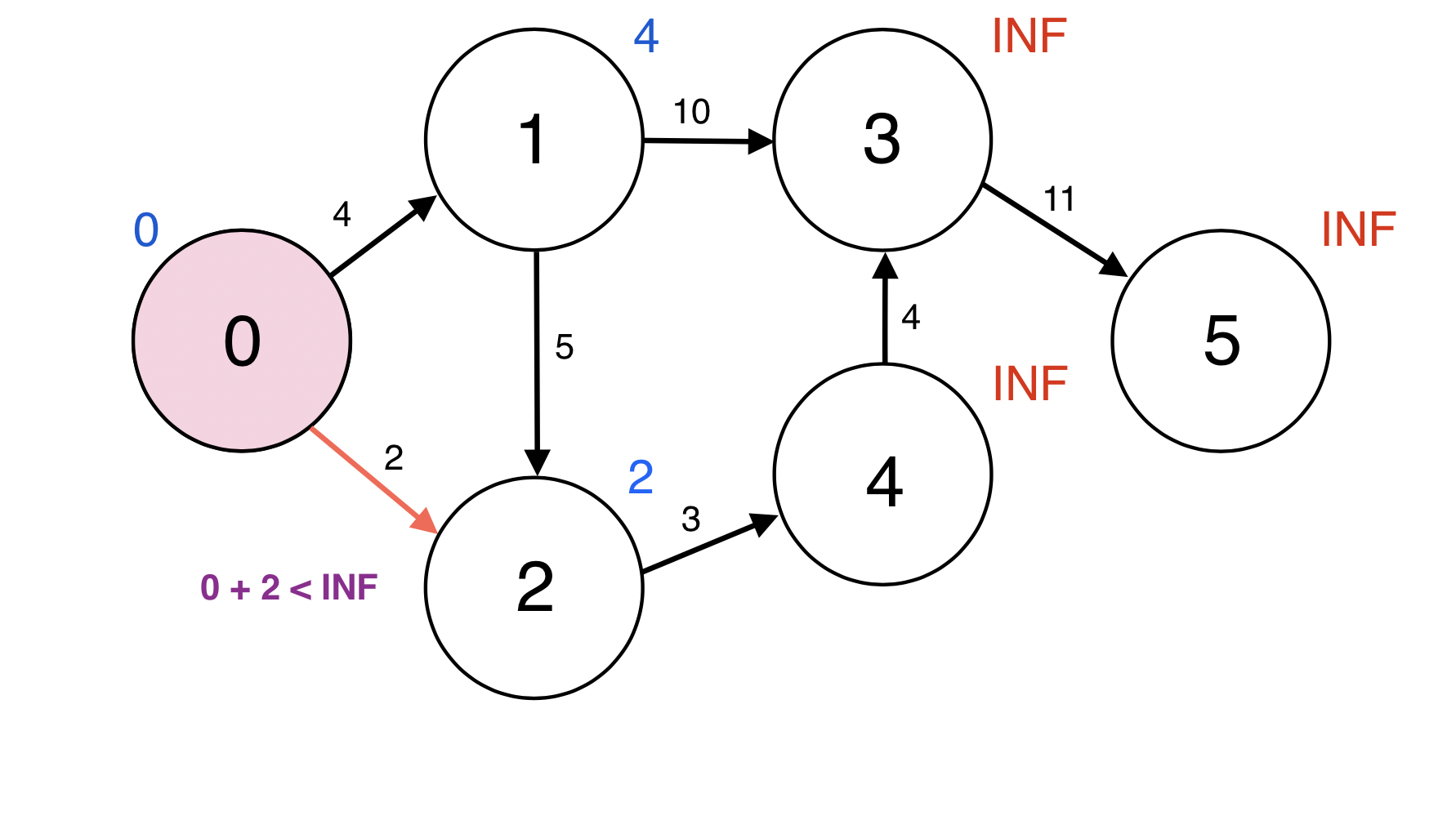
0번 정점과 인접한 정점 2번에 대하여 d(0) + w(0, 2) < d(1): 0 + 2 < INF이므로
d(2)을 2로 업데이트 한다.
업데이트 되었으므로 2번 정점을 Queue에 넣는다.
Queue : [1 2]
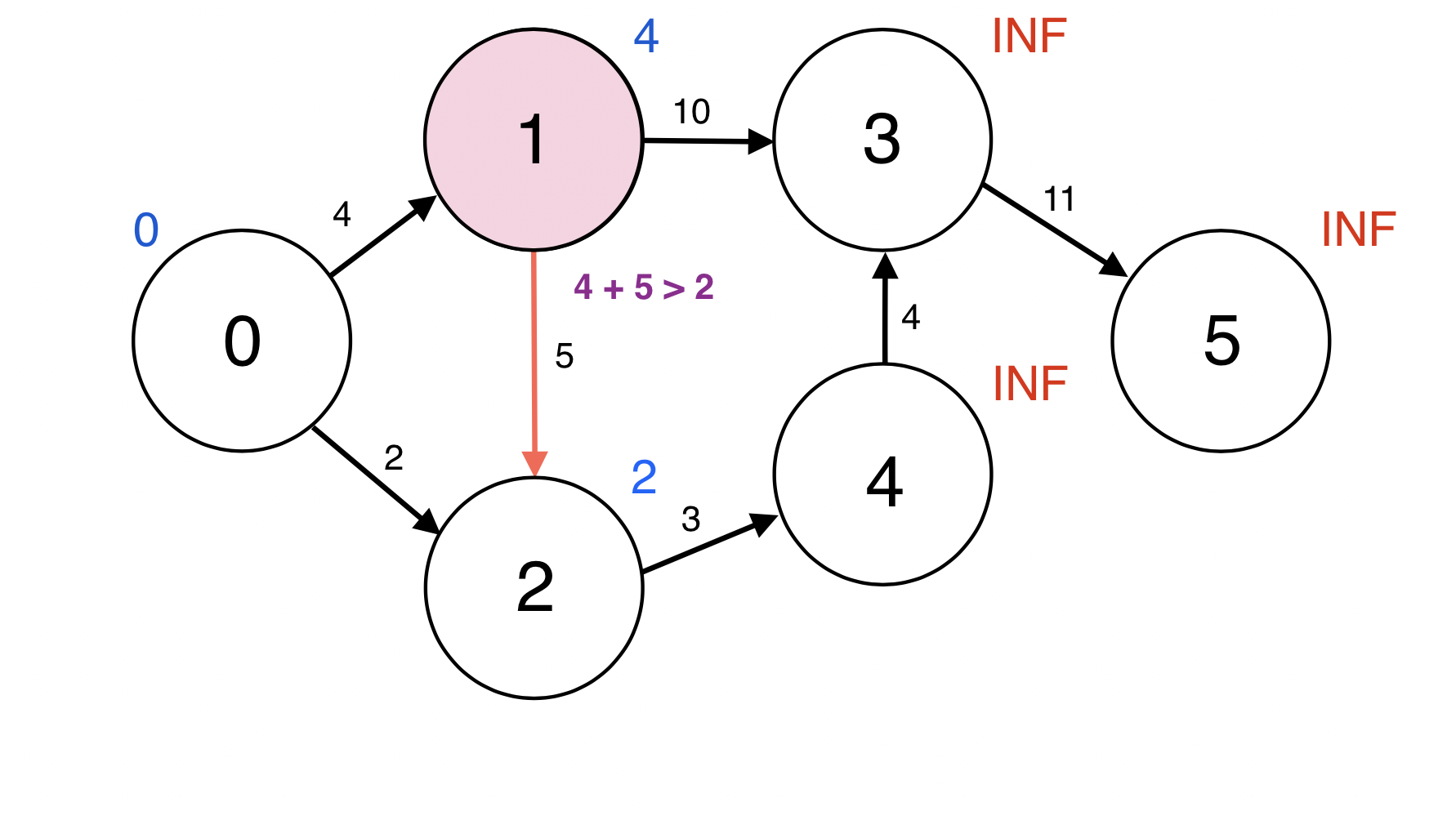
Queue에서 원소 하나를 pop한다.
1번 정점과 인접한 정점 2번에 대하여 d(1) + w(1, 2) < d(2): 4 + 5 > 2이므로
d(2)를 업데이트 하지 않는다.
Queue : [2]
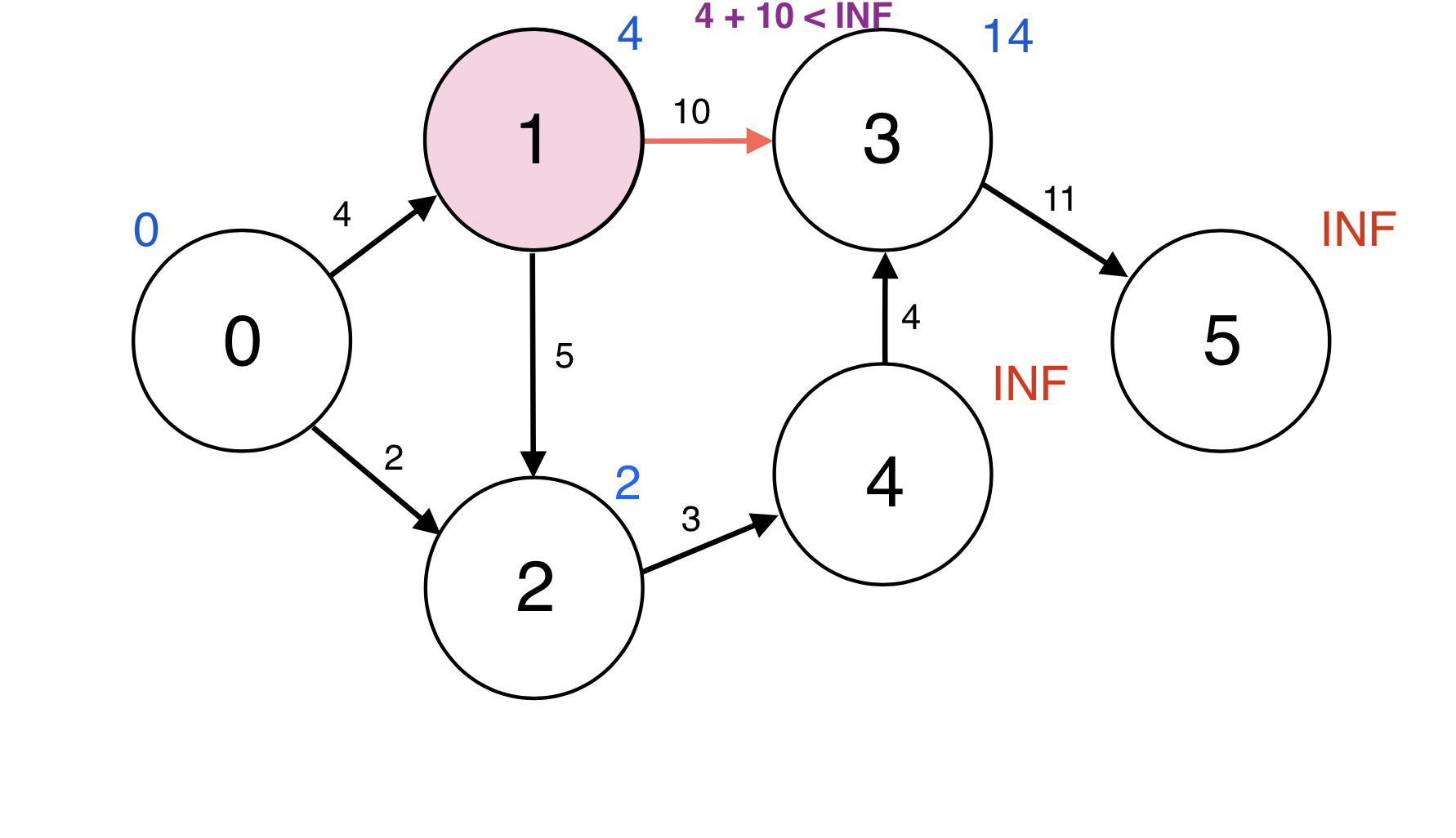
1번 정점과 인접한 정점 3번에 대하여 d(1) + w(1, 3) < d(3): 4 + 10 < INF이므로
d(3)을 14로 업데이트 한다.
업데이트 되었으므로 3번 정점을 Queue에 넣는다.
Queue : [2, 3]
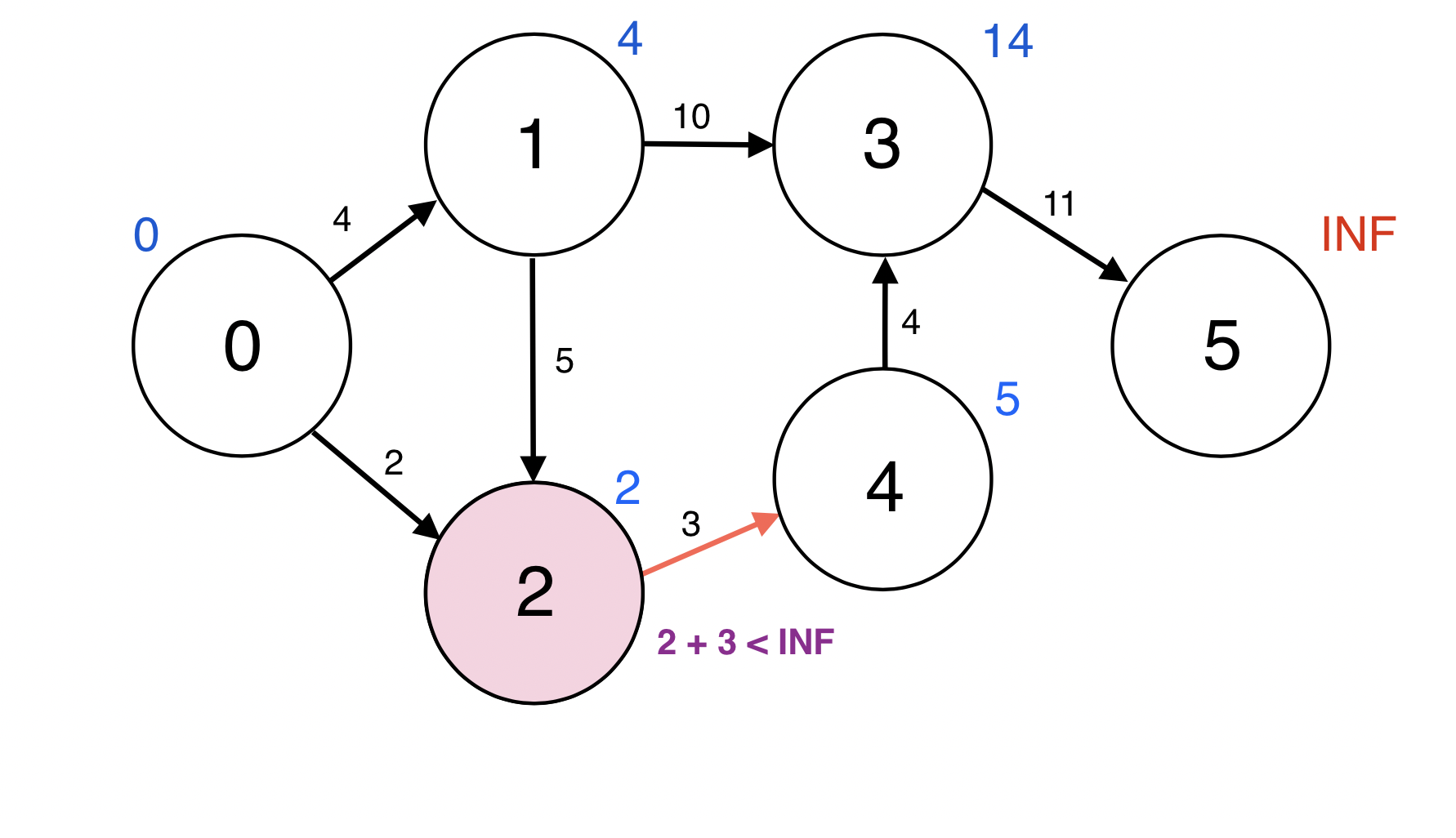
Queue에서 원소 하나를 pop한다.
2번 정점과 인접한 정점 4번에 대하여 d(2) + w(2, 4) < d(4): 2 + 3 < INF이므로
d(4)을 5로 업데이트 한다.
업데이트 되었으므로 4번 정점을 Queue에 넣는다.
Queue : [3, 4]
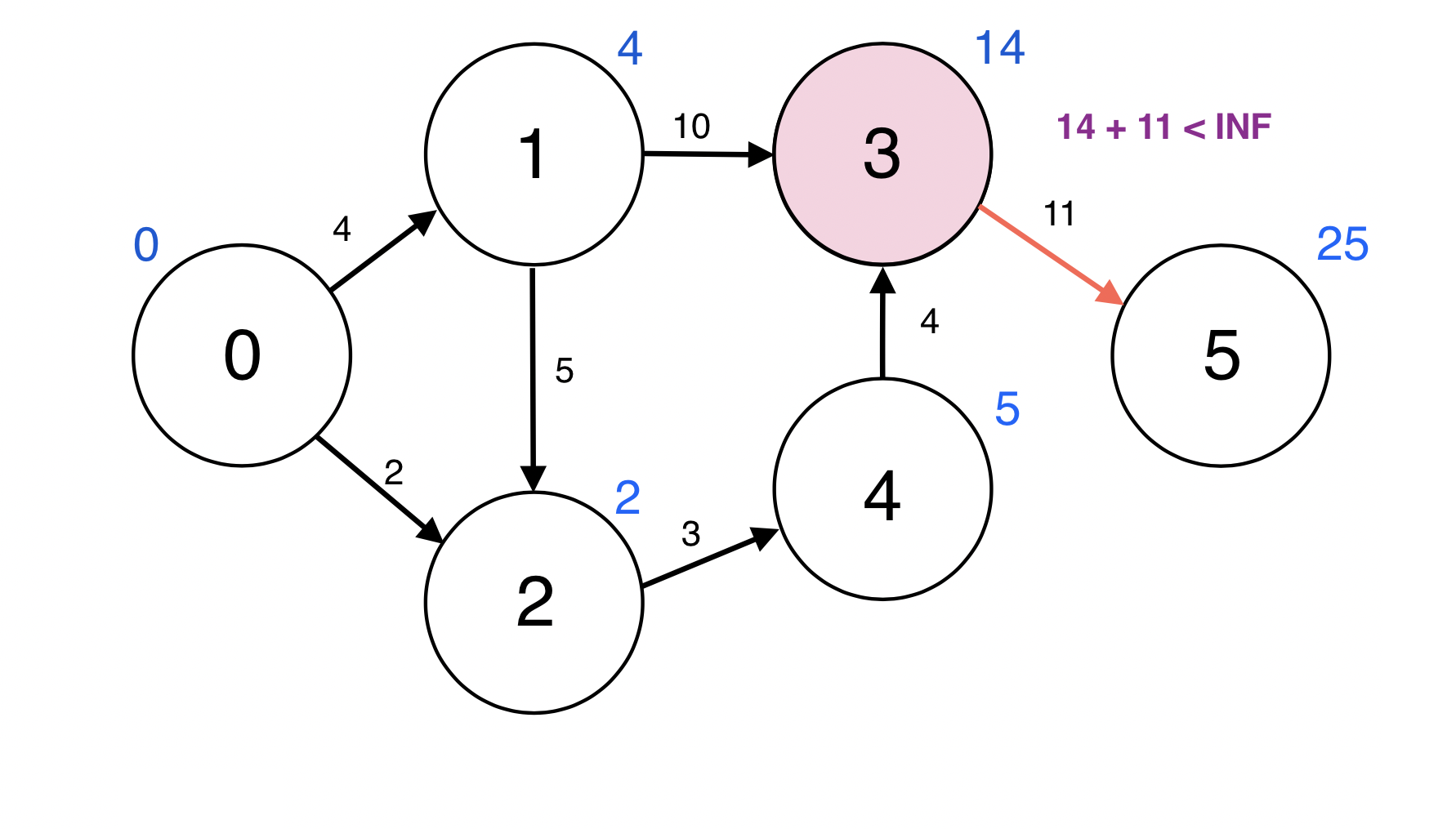
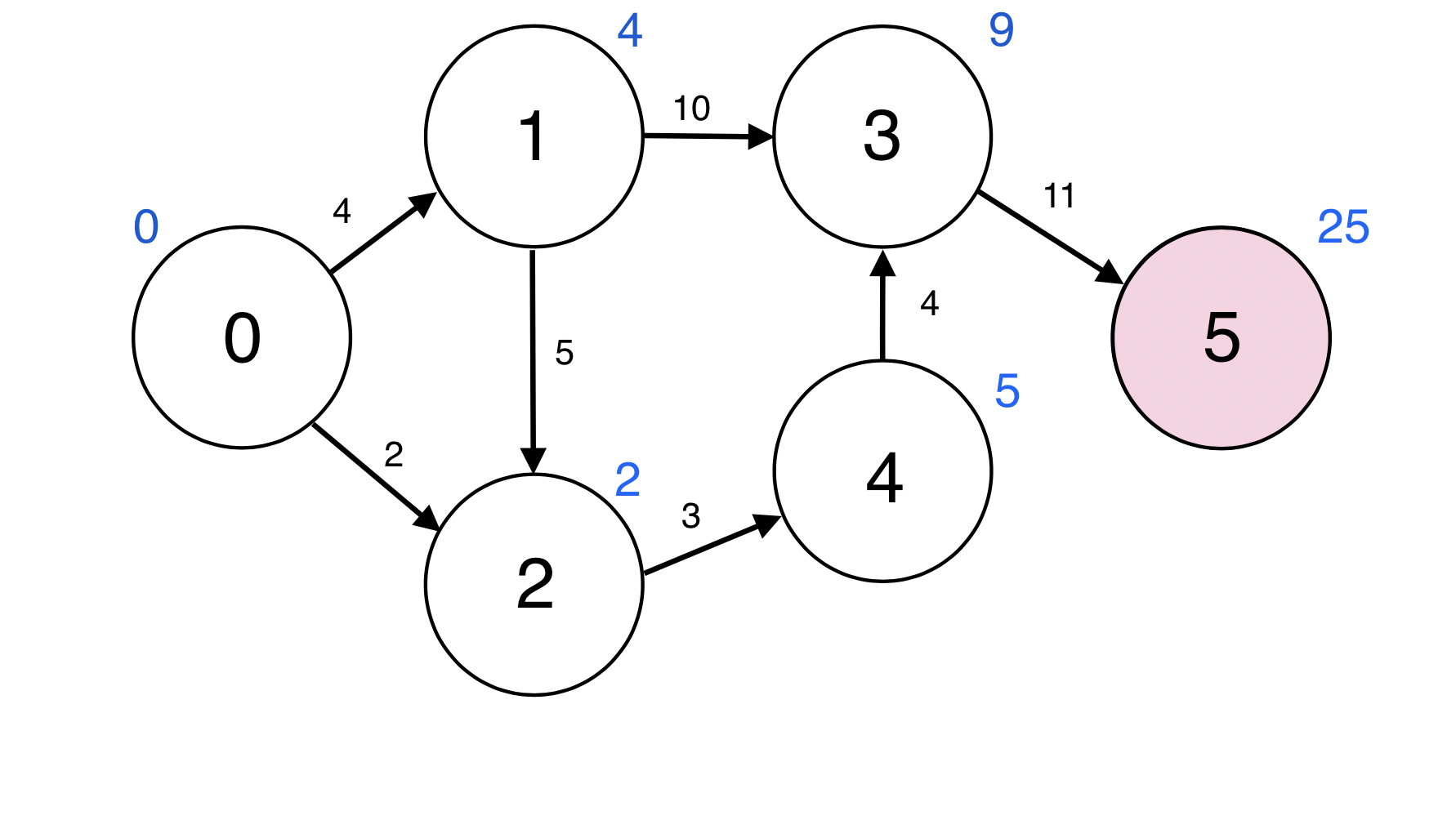
Queue에서 원소 하나를 pop한다.
3번 정점과 인접한 정점 5번에 대하여 d(3) + w(3, 5) < d(5): 14 + 11 < INF이므로
d(5)을 25로 업데이트 한다.
업데이트 되었으므로 5번 정점을 Queue에 넣는다.
Queue : [4, 5]
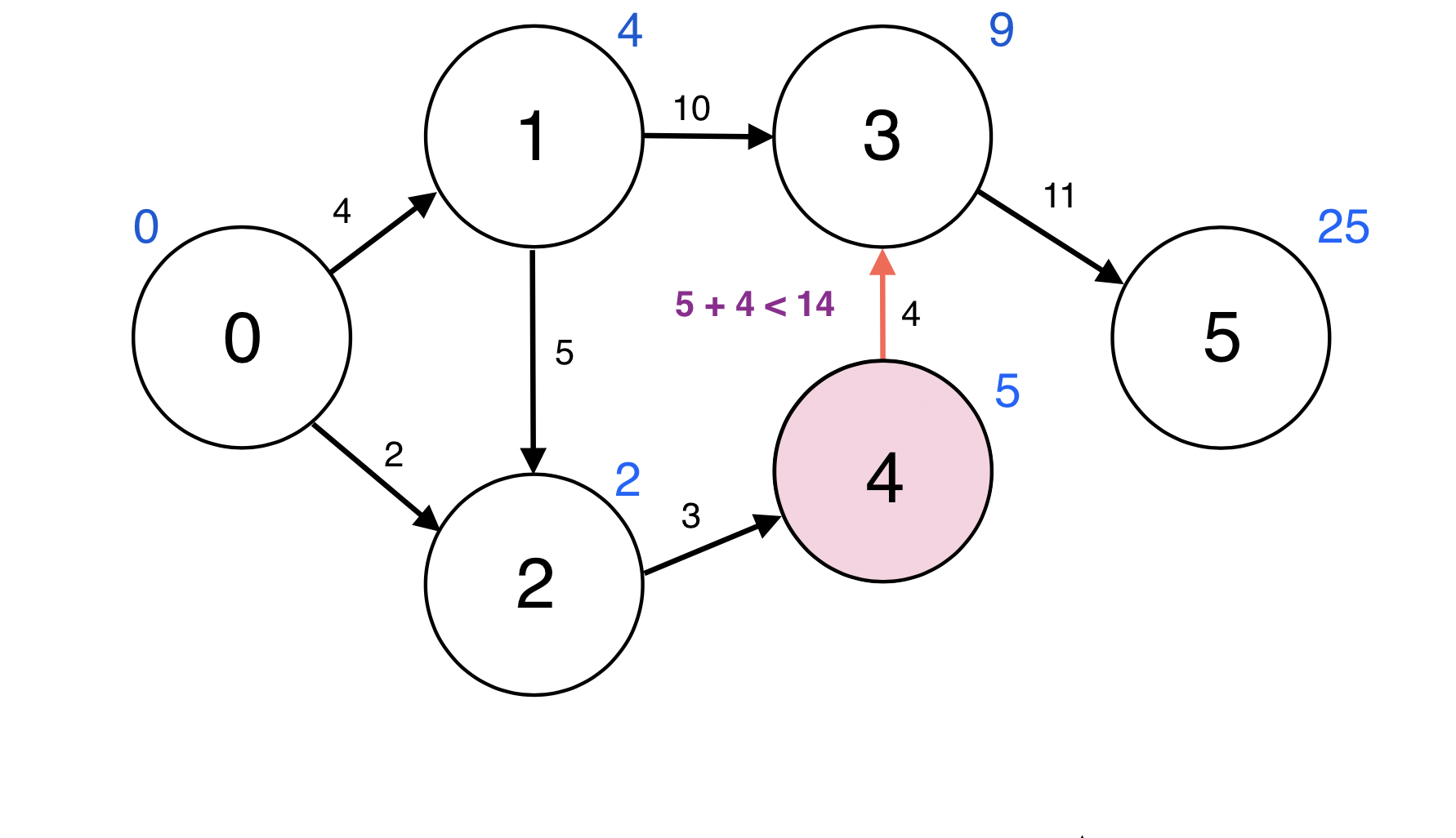
Queue에서 원소 하나를 pop한다.
4번 정점과 인접한 정점 3번에 대하여 d(4) + w(4, 3) < d(3): 5 + 4 < 14이므로
d(3)을 9로 업데이트 한다.
업데이트 되었으므로 3번 정점을 Queue에 넣는다.
Queue : [5, 3]
Queue에서 원소 하나를 pop한다.
5번 정점과 인접한 정점이 없다.
Queue : [3]
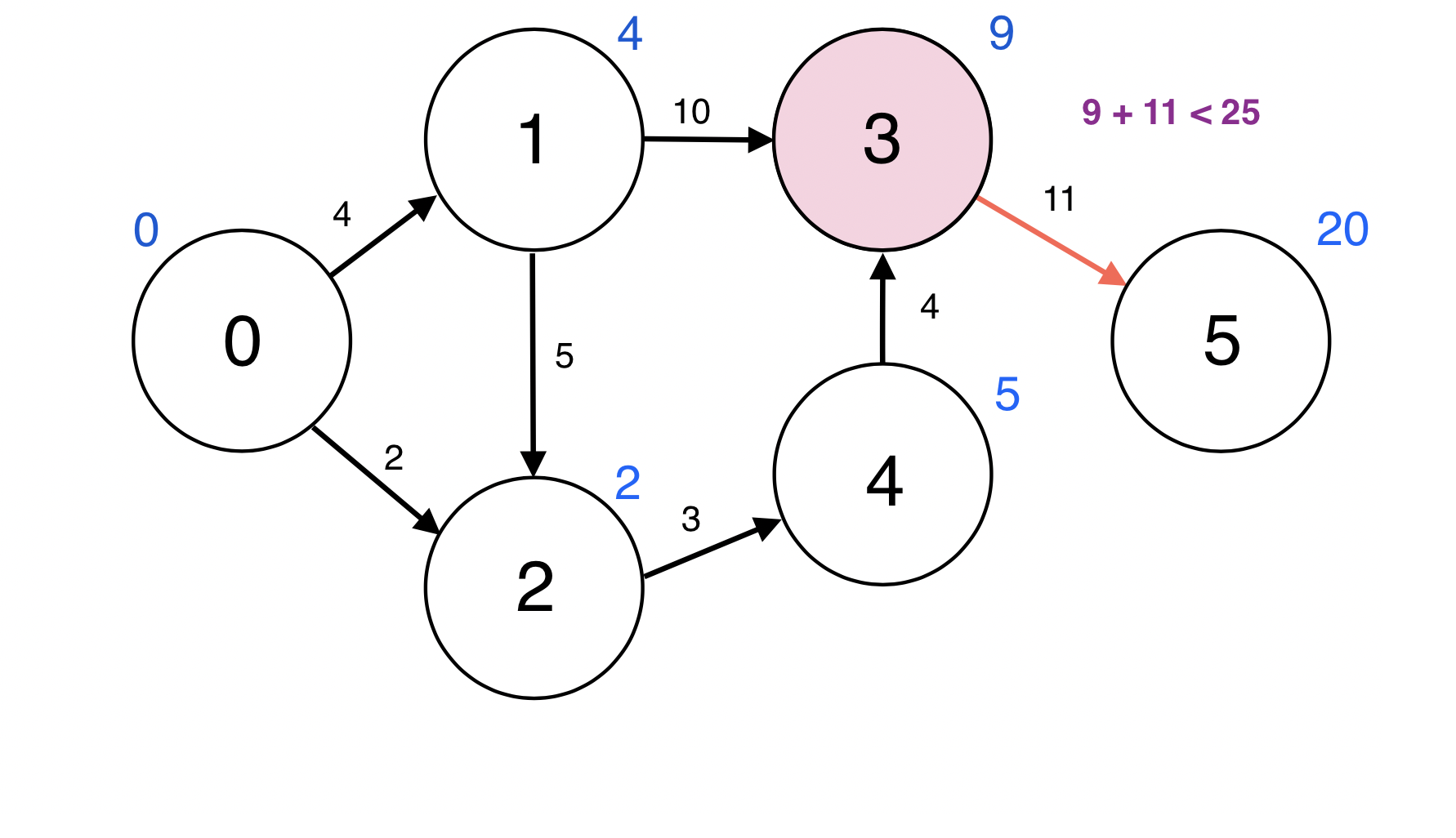
Queue에서 원소 하나를 pop한다.
3번 정점과 인접한 정점 5번에 대하여 d(3) + w(3, 5) < d(5): 9 + 11 < 25이므로
d(5)을 20로 업데이트 한다.
업데이트 되었으므로 5번 정점을 Queue에 넣는다.
Queue : [5]
Queue에서 원소 하나를 pop한다.
5번 정점과 인접한 정점이 없다.
Queue : [ ]
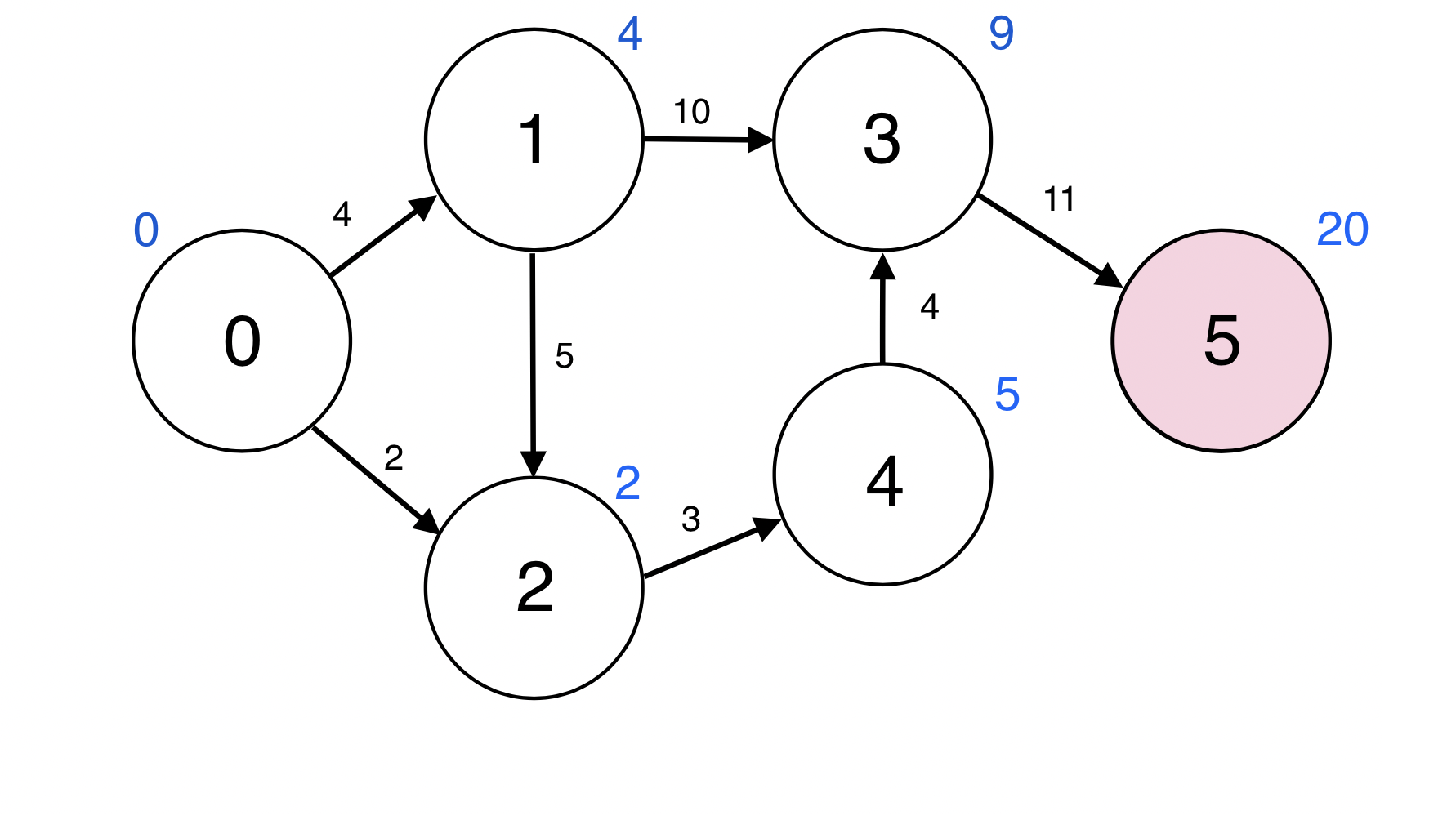
큐가 비었으므로 SPFA가 완료되었다.
0번 부터 5번으로의 최단경로는 빨간선을 따라간 경로이고 그 거리는 20이다.
Implementation
다음은 위 의사코드를 바탕으로 SPFA를 구현한 자바 메소드이다.
static void shortestPathFasterAlgorithm(int s){
dist = new int[n];
onQueue = new boolean[n];
Arrays.fill(dist, INF);
Queue<Integer> queue = new LinkedList<>();
queue.offer(s);
dist[s] = 0;
onQueue[s] = true;
while (!queue.isEmpty()){
int cur = queue.poll();
onQueue[cur] = false;
for (Edge e : graph[cur]){
if (dist[cur] + e.cost < dist[e.to]){
dist[e.to] = dist[cur] + e.cost; // Edge Relaxation
}
}
}
}
현재 Queue에서 정점 $v$의 존재 유무를 추적하기 위해 위 코드에서는 onQueue[] 를 사용한다.
그래프의 가중치 간선 정보를 구성하기 위해 아래의 Edge 클래스를 사용한다.
to는 다음 인접 정점의 번호, cost는 간선 비용(가중치)를 나타낸다.
...
// static ArrayList<Edge> [] graph;
...
static class Edge{
int to;
int cost;
// Constructor
public Edge(int to, int cost) {
this.to = to;
this.cost = cost;
}
}
다음은 SPFA를 구현한 자바 코드이다.
그래프의 입력은 예제 그래프를 사용하였고, 최단경로를 추적하고 구성하기 위해 pred[]배열을 선언한 뒤 SPFA의 실행 중에 어느 한 포인트에서 정점 u, v가 있고(정점 v가 u에 의해 relaxation 되어지는 정점), relaxation 되어진 정점 v가 있으면, 그 정점을 relaxation하게 만든 정점 u가 최단경로 상의 이전 노드 이므로 pred[e.to] = cur;를 하여 경로를 구축한다. 그 다음 printPathReconstruction함수로 경로를 출력한다.
이 프로그램은 최단경로 거리와 그 경로를 출력한다.
- Input: Graph G, start vertex
- Output: Distance of shortest path of Graph G, shortest path of Graph G
시작 정점은 0번이다.
import java.io.*;
import java.util.*;
import java.util.LinkedList;
/**
* This program is to find Shortest path in weighted graph using SPFA.
* Time Complexity : Worst case : O(VE) same as Standard Bellman ford
* Average case : O(E) - not proved
*
* @author Lemidia(Gyeong)
*/
public class ShortestPathFasterAlgorithm{
// the number of vertices in Graph G
static int n;
// Shortest distance from s to each vertex v
static int dist[];
// for construct shortest path
static int pred[];
static ArrayList<Edge> [] graph;
static final int INF = Integer.MAX_VALUE;
// For check whether the vertex is on queue or not
static boolean onQueue[];
// Init Graph G
static void createGraph(){
graph = new ArrayList[n];
for (int i = 0; i < n; i++){
graph[i] = new ArrayList<>();
}
}
// Add weighted direct edges.
static void addEdge(int from, int to, int cost){
Edge e = new Edge(to, cost);
graph[from].add(e);
}
static void shortestPathFasterAlgorithm(int s){
dist = new int[n];
pred = new int[n];
onQueue = new boolean[n];
Arrays.fill(dist, INF);
Queue<Integer> queue = new LinkedList<>();
queue.offer(s);
dist[s] = 0;
onQueue[s] = true;
while (!queue.isEmpty()){
int cur = queue.poll();
onQueue[cur] = false;
for (Edge e : graph[cur]){
if (dist[cur] + e.cost < dist[e.to]){
dist[e.to] = dist[cur] + e.cost; // Edge Relaxation
pred[e.to] = cur; // store previous node
if (onQueue[e.to] == false){ // Node(e.to) is not in the queue
onQueue[e.to] = true;
queue.offer(e.to);
}
}
}
}
}
static void printPathReconstruction(int start, int end){
if (end == start) {
System.out.print(start);
return;
}
pathReconstruction(start, pred[end]);
System.out.print(" -> " + end );
}
public static void main(String[] args) throws IOException {
BufferedReader br = new BufferedReader(new InputStreamReader(System.in));
n = 6;
int start = 0;
createGraph();
addEdge(0, 1, 4);
addEdge(0, 2, 2);
addEdge(1, 2, 5);
addEdge(1, 3, 10);
addEdge(2, 4, 3);
addEdge(3, 5, 11);
addEdge(4, 3, 4);
shortestPathFasterAlgorithm(start);
System.out.println("Shortest path distance : " + dist[5]);
System.out.print("Shortest path : ");
printPathReconstruction(start, 5);
}
static class Edge{
int to;
int cost;
public Edge(int to, int cost) {
this.to = to;
this.cost = cost;
}
}
}
Output:
Shortest path distance : 20
Shortest path : 0 -> 2 -> 4 -> 3 -> 5
Optimization techniques
Small Label First (SLF) technique.
변 경감(Edge relaxation) 되어진 정점 $v$를 항상 Queue 뒤에 추가하였지만 이 technique에서는 그 추가되어진 정점 $v$의 $d(v)$와 Queue의 맨 앞 정점의 거리 $d(front(Q))$를 비교하고 $d(v)$가 더 작다면 $d(v)$를 Queue의 맨 앞으로 보낸다. 이 technique은 front에 원소 추가를 요구하므로 front와 rear 전부 pop(), offer()연산을 지원하는 Deque(데크) 자료구조를 사용함으로써 구현할 수 있다.
위 SPFA 자바 메소드에서 Queue<Integer> queue = new LinkedList<>();를 Deque<Integer> queue = new LinkedList<>();로 하여 Deque를 사용한다.
다음은 이 technique의 의사코드이다.
procedure Small-Label-First(G, Q)
if d(back(Q)) < d(front(Q)) then
u := pop back of Q
push u into front of Q
다음은 SPFA에 위 최적화를 적용한 코드이다.
static void shortestPathFasterAlgorithm(int s){
dist = new int[n];
pred = new int[n];
onQueue = new boolean[n];
Arrays.fill(dist, INF);
Deque<Integer> queue = new LinkedList<>();
queue.offer(s);
dist[s] = 0;
onQueue[s] = true;
while (!queue.isEmpty()){
int cur = queue.poll();
onQueue[cur] = false;
for (Edge e : graph[cur]){
if (dist[cur] + e.cost < dist[e.to]){
dist[e.to] = dist[cur] + e.cost; // Edge Relaxation
pred[e.to] = cur; // store previous node
if (onQueue[e.to] == false){ // Node(e.to) is not in the queue
onQueue[e.to] = true;
queue.offer(e.to);
// Optimization <Small Label First>
if (dist[e.to] < dist[queue.peekFirst()]){
queue.offerFirst(queue.pollLast());
}
}
}
}
}
}
Large Label Last (LLL) technique.
Queue의 front 원소의 값이 현재 Queue에 들어있는 모든 정점의 평균보다 작게 하기 위해, Queue에 들어있는 모드 정점 $v$의 평균을 구하고, Queue 앞에서 부터 평균보다 큰 값을 가진 정점 $v$들을 Queue의 맨 뒤로 보내는 연산이다. 평균보다 작은 값을 가진 정점 $v$가 나오면 loop를 빠져나온다.
다음은 이 technique의 의사코드이다.
procedure Large-Label-Last(G, Q)
x := average of d(v) for all v in Q
while d(front(Q)) > x
u := pop front of Q
push u to back of Q
Running time
The worst-case running time : $O(|V|\cdot|E|)$
SPFA의 최악 실행 시간은 standard Bellman-Ford algorithm과 같은 $O(|V|\cdot|E|)$ 이다.
The average running time : $O(|E|)$
실험으로 보여지는 SPFA의 평균 실행 시간은 $O(|E|)$ 수준이다. 그러나 평균 실행 시간은 아직 증명 되지 않았다.
Leave a comment